ECEn 631 Team Class Projects
Baseball Catcher Project :
This team project focuses on using a stereo-vision system to estimate
the 3-D trajectory of a baseball and control the catcher (x-y stage) to
catch it. The baseball ball delivered by a baseball pitching machine
travels at a speed close to 55 mph. The distance between the launcher
and the catcher is roughly 35 feet. It takes approximately 300 mSec for
the baseball to travel the entire distance. The response and maximum
travel time of the catcher is roughly 150 mSec depending on the
distacne to travel. Using a pair of Firewire cameras running at 60
frames per second, this vision system has to capture and process 10 to
15 image pairs, estimate the baseball trajectory, and move the catcher
to catche the baseball, all in about 150 mSec.
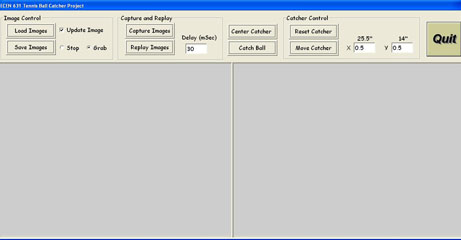
Baseball catcher program.
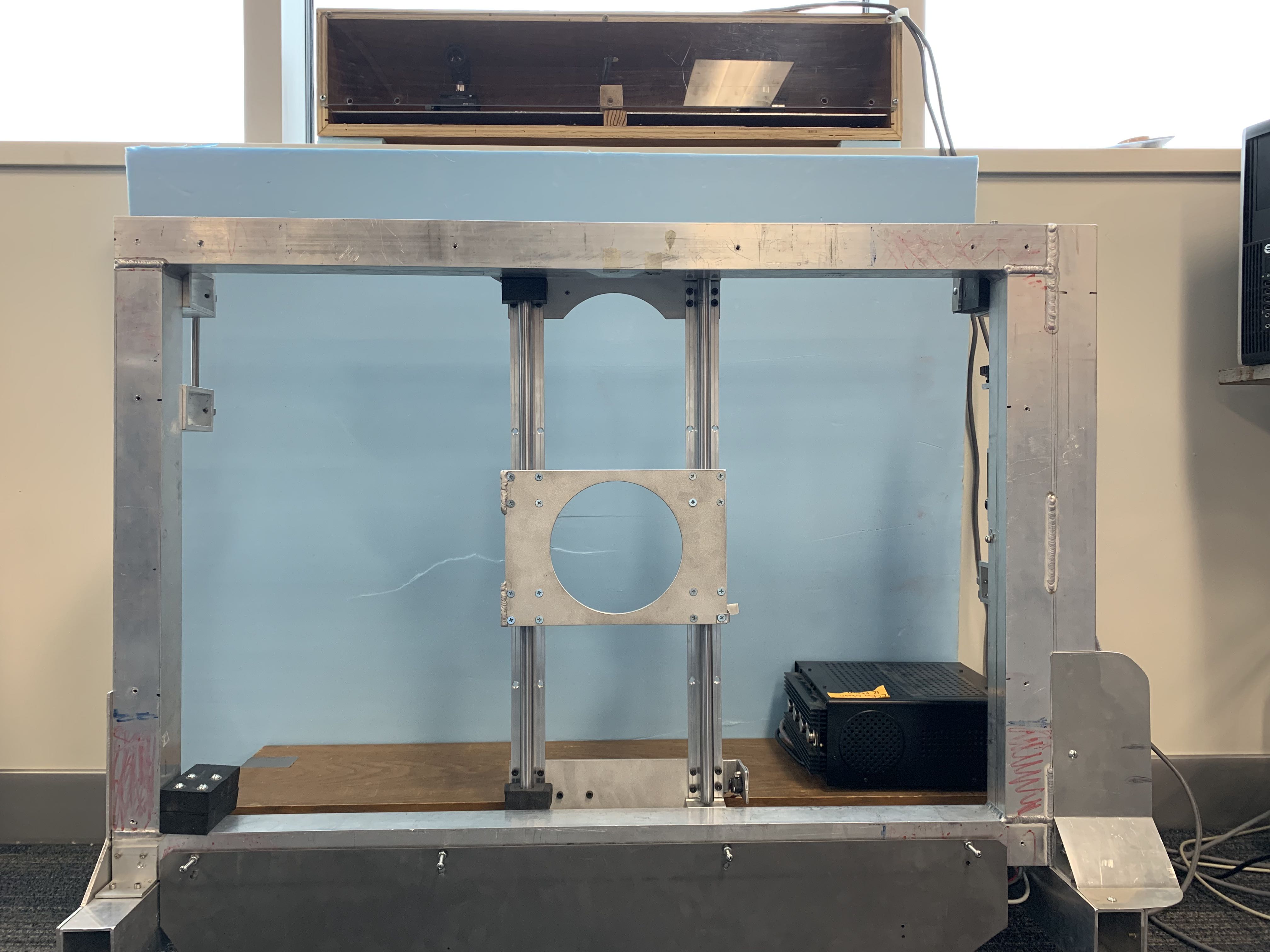
Baseball catcher and launcher in 2015.


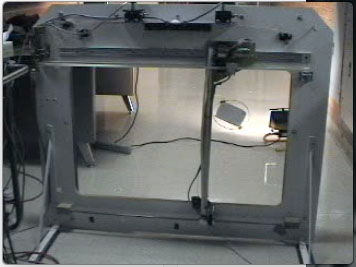
Baseball catcher and launcher in 2012.


Baseball catcher and launcher in 2010.


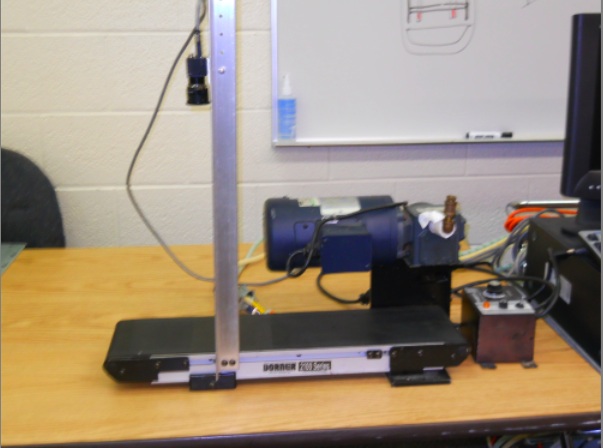
Baseball catcher and launcher in 2006.

Downloads:
Visual
Studio Project (VS2013 and OpenCV 3.0.0, updated on
10/10/2015)
Practice
Images (updated on 03/25/10) Superimposed left and
right videos (3.6 MB MPG file, updated on 01/12/2011)
Tennis
ball tracking video (51 KB mp4 file, updated on 01/08/2013)
Self-driving Cars:
Video 3 (2020) (YouTube, Right click and open in new tab)
Video 2 (2019) (YouTube, Right click and open in new tab)
Video 1 (2019) (YouTube, Right click and open in new tab)
Video 15 (2019) (YouTube, Right click and open in new tab)
Video 14 (2016) (YouTube, Right click and open in new tab)
Video 13 (2015) (104.1 MB mp4 file, Updated on 10/08/2015)
Video 12 (2014) (32.7 MB mp4 file, Updated on 03/25/2014)
Video 11 (2013) (11.1 MB mp4 file, by John Barrus, Mark Crockett, and David Wheeler, updated on 03/25/2013)
Video 10 (2013) (11.4 MB mp4 file, by Kurtis Cahill, Michael Gardiner, and Nathan Harward, updated on 04/01/2013)
Video 9 (2012) (3.5 MB flv file, by Robert Klaus, Michael Plooster, Laith Sahawneh, updated on 04/11/2012)
Video 8 (2012) (8.7 MB flv file, by Nathan Edwards, Joel Howard, Peter Niedfeldt, updated on 04/11/2012)
Video 7 (2011) (4.0 MB MPEG-4 file, updated on 04/04/2011)
Video 6 (2011) (1.5 MB AVI file, updated on 03/29/2011)
Video 5 (2011) (5.1 MB AVI file, updated on 03/25/2011)
Video 4 (2011) (6.1 MB AVI file, updated on 03/25/2011)
Video 3 (2011) (8.7 MB AVI file, updated on 03/25/2011)
Video 2 (2008) (26.9 MB AVI file, updated on 01/12/2011)
Video 1 (2008) (28.7 MB AVI file, updated on 01/12/2011)
Motion Analysis Project: 15%
This team project focuses on using motion estimation techniques for
robot navigation applications. Students will learn to program an
Android smartphone to control a small autonomous robot to navigate an
indoor course while avoiding obstacles. Students will use OpenCV
functions to develop motion estimation algorithms to guide and control
the robot. Students will gain hands-on experience by participating in a
final competition at the end of the project.

Links:
Android
Developer
OpenCV in
Android
Downloads:
Working IOIO
Library (Updated on 09/06/2013)
Sample IOIO Code
(Updated on 01/04/2013)
Blind
Drive (Drive Only) (updated on 01/04/2013)
OpenCV (Vision Only)
(updated on 01/04/2013)
Vision
Drive (Both) (updated on 01/04/2013)
Real-time visual inspection : 5%
This project is the last part of the three focuses of this robotic
vision course. It is designed to introduce machine vision application
to students through a simple real-time visual inspection project.
Machine vision technology has been used for many industrial factory
automation applications in the past 30 years. Through this project,
students learn to design real-time vision algorithms and to use machine
vision technology for visual inspection applications.

Downloads:
Visual
Studio Project (VS2013 and OpenCV 3.0.0, updated on
10/10/2015)
Project
Information (updated on 01/15/12)
Videos - 2011
Flash Video
or Windows
Media (5.1 MB, updated on 02/17/11)